Skip to main content
車輛動態與比賽數據報告
分析範圍
- 資料日期:2026-05-16
- 參賽車輛:TTR9.5eco-4X, TTR9eco, eco8_cs
- 原始來源:
/api/devices、/api/devices/{device_id}、/api/devices/{device_id}/track
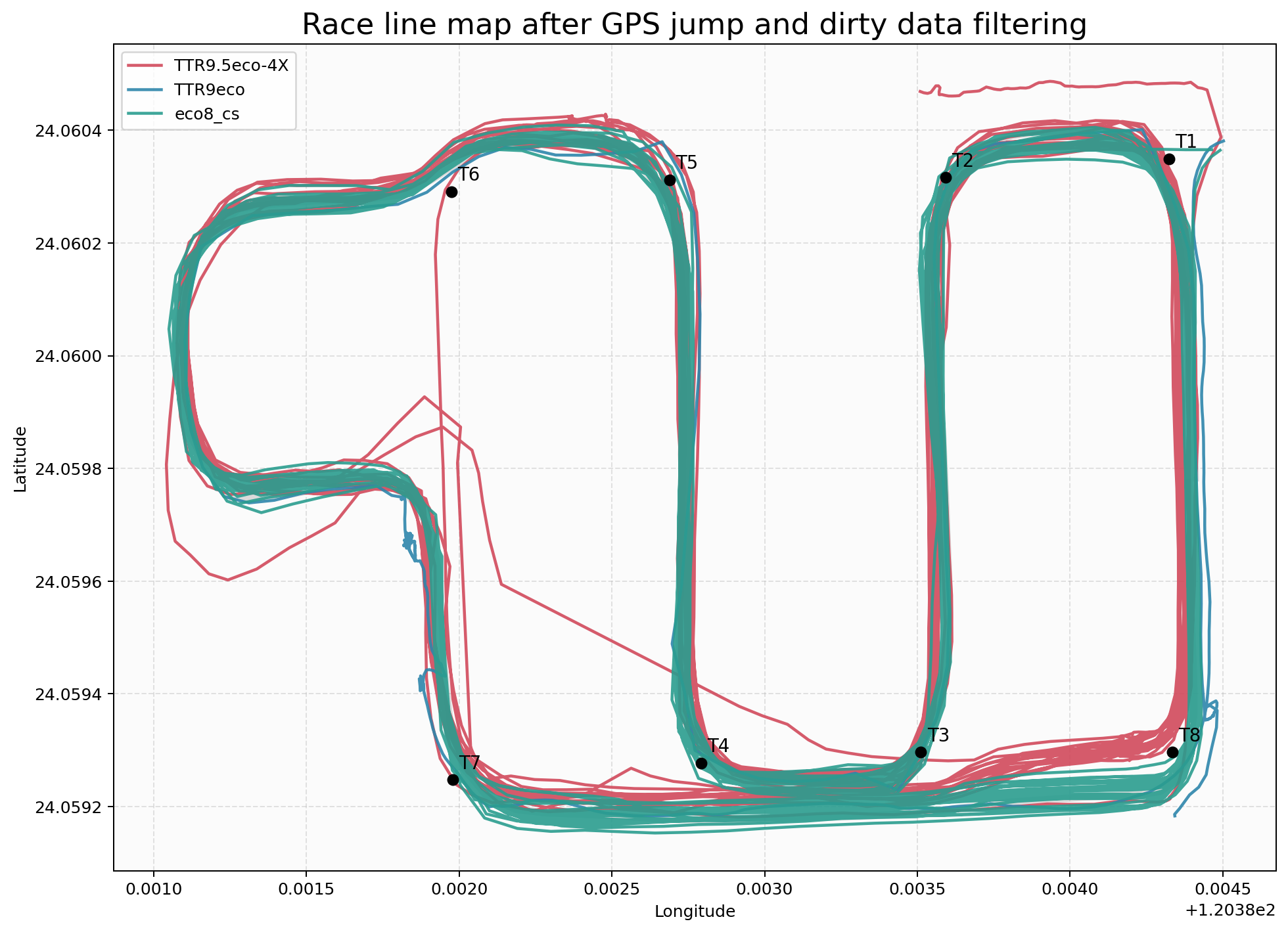
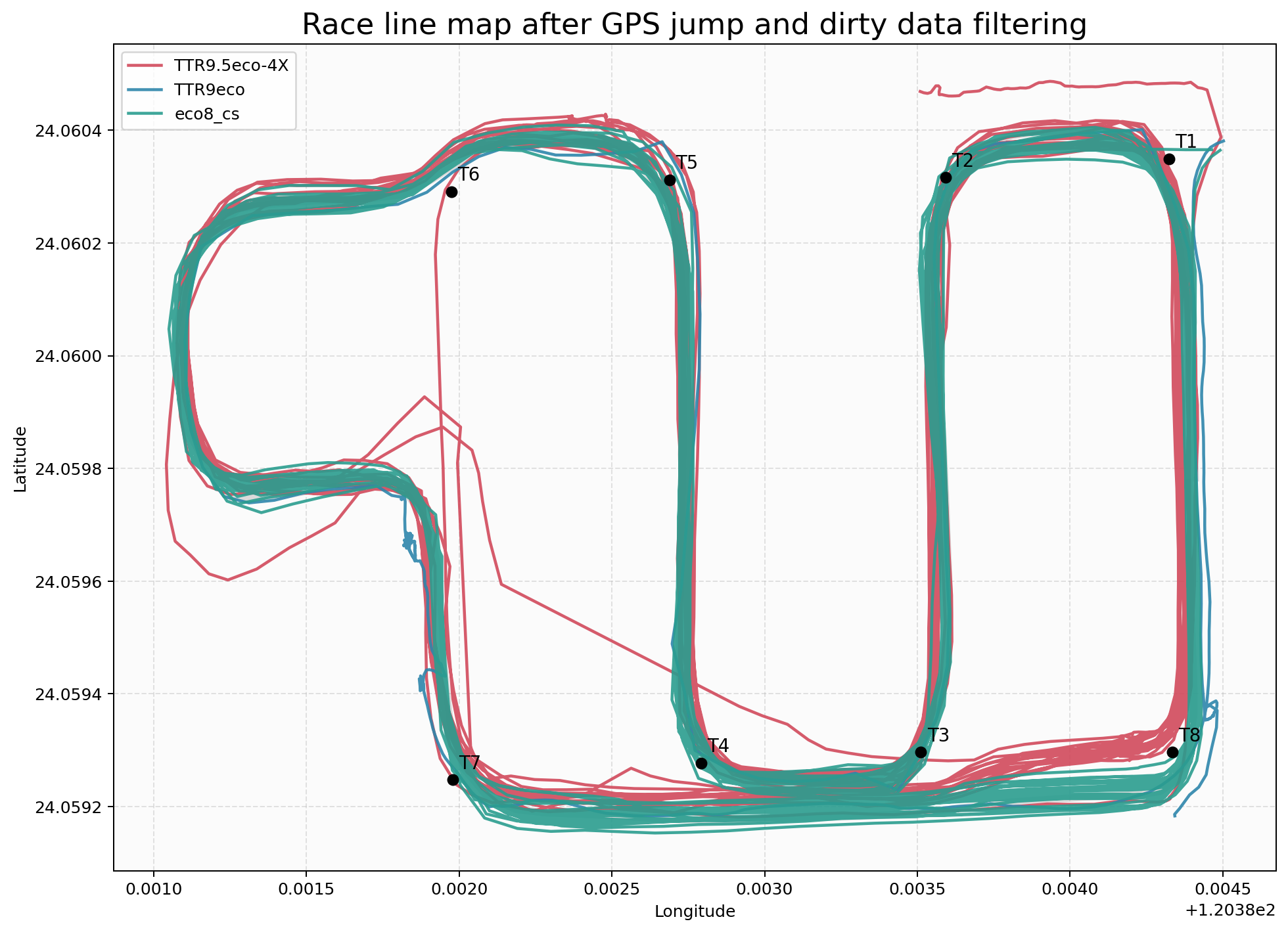
- 清洗規則:先移除單點式 GPS 跳點,再以
eco8_cs 最快圈建立參考賽道線,將偏離賽道中心線超過 22 公尺的點視為 dirty data,並排除出圈速與過彎分析。
比賽結果摘要
- 第 1 名
eco8_cs:最佳圈 107.999 秒,最高速 46.5 km/h,圈速標準差 4.39 秒。
- 第 2 名
TTR9.5eco-4X:最佳圈 111.999 秒,最高速 47.2 km/h,圈速標準差 15.55 秒。
- 第 3 名
TTR9eco:最佳圈 2049.001 秒,最高速 47.1 km/h,圈速標準差 0,樣本不足。
eco8_cs 動態分析
eco8_cs 的最佳乾淨圈速為 107.999 秒,領先 TTR9.5eco-4X 4.000 秒,屬於明確優勢勝出。- 但如果從穩定度看,
eco8_cs 不能算開得漂亮。最快圈雖然是全場最佳,但圈速分布從約 108 秒到 125 秒都有,代表單圈峰值速度與連續複製能力之間存在明顯落差。
- 圈速標準差 4.39 秒,對一條單圈約 108 到 115 秒的賽道來說波動不小,這種
Δt 更像是有速度、但節奏不乾淨,而不是成熟穩定的比賽駕駛。
- 換句話說,
eco8_cs 的特性比較像「有 attack pace,但波動大」:單圈能力很強,卻不是圈圈都能穩定複製。
- 從彎道表現看,它在多個彎位仍保有較高最低過彎速,這代表賽車底盤與機械素質足夠優秀,能夠提供足夠的信心使車手用更激烈的方式駕馭。
- 綜合判斷,
eco8_cs 比較接近「不是穩定快,而是偶爾很快」;如果用賽車語言描述,就是單圈爆發力強,但節奏管理、煞車點重複性與出彎一致性仍有改善空間。
其他車輛對照
TTR9.5eco-4X:有效圈 15 圈,平均速度 24.6 km/h,平均 GPS 精度 10.0 m。速度接近領先組,但中後段圈速衰退較明顯,疑似輪胎或駕駛保守收車。TTR9eco:有效圈 1 圈,平均速度 1.9 km/h,平均 GPS 精度 6.9 m。大量時間停留在賽道路線外或低速區,推測有維修、失誤或未完成有效比賽節奏。
過彎表現
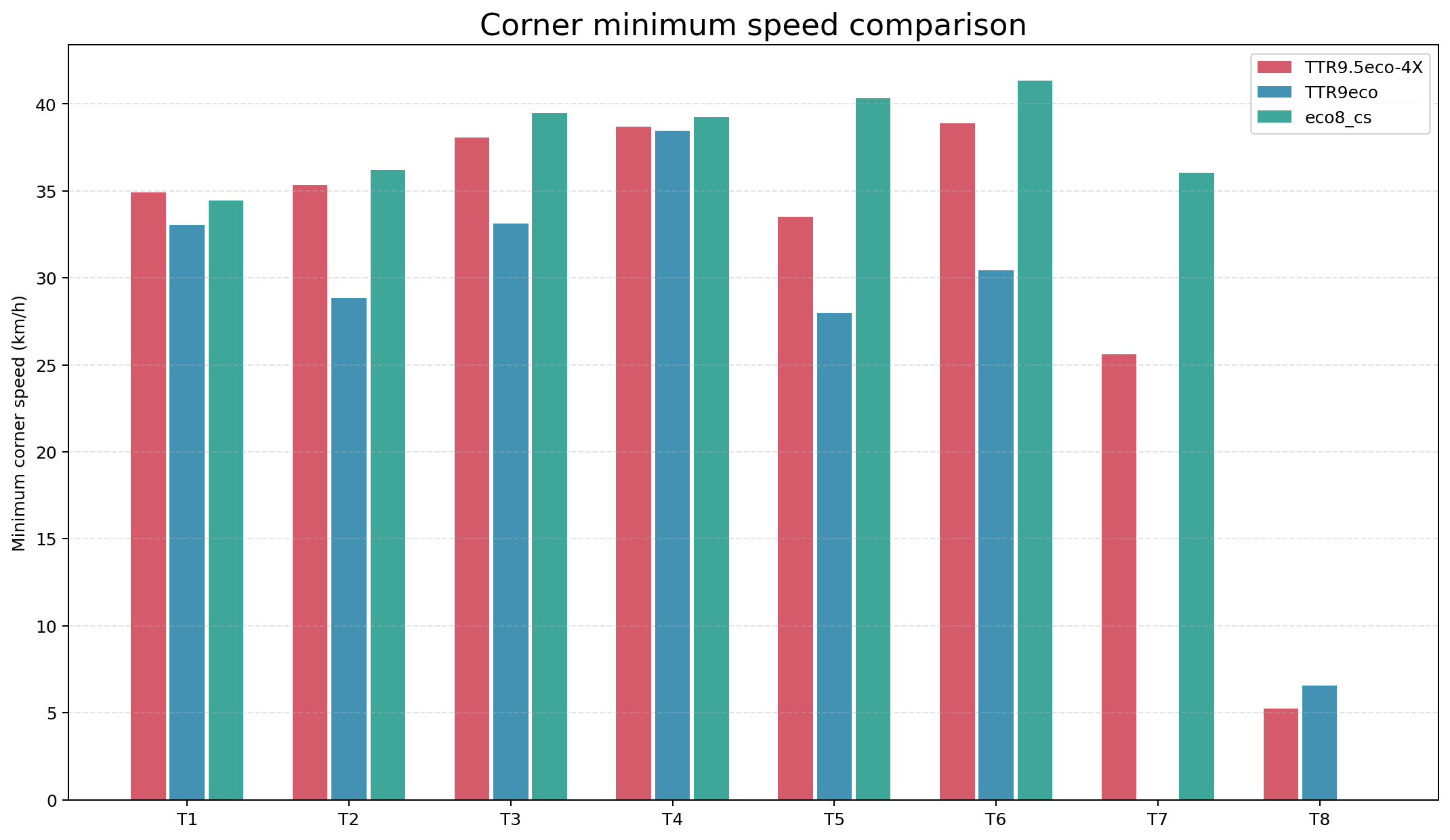
- T1:
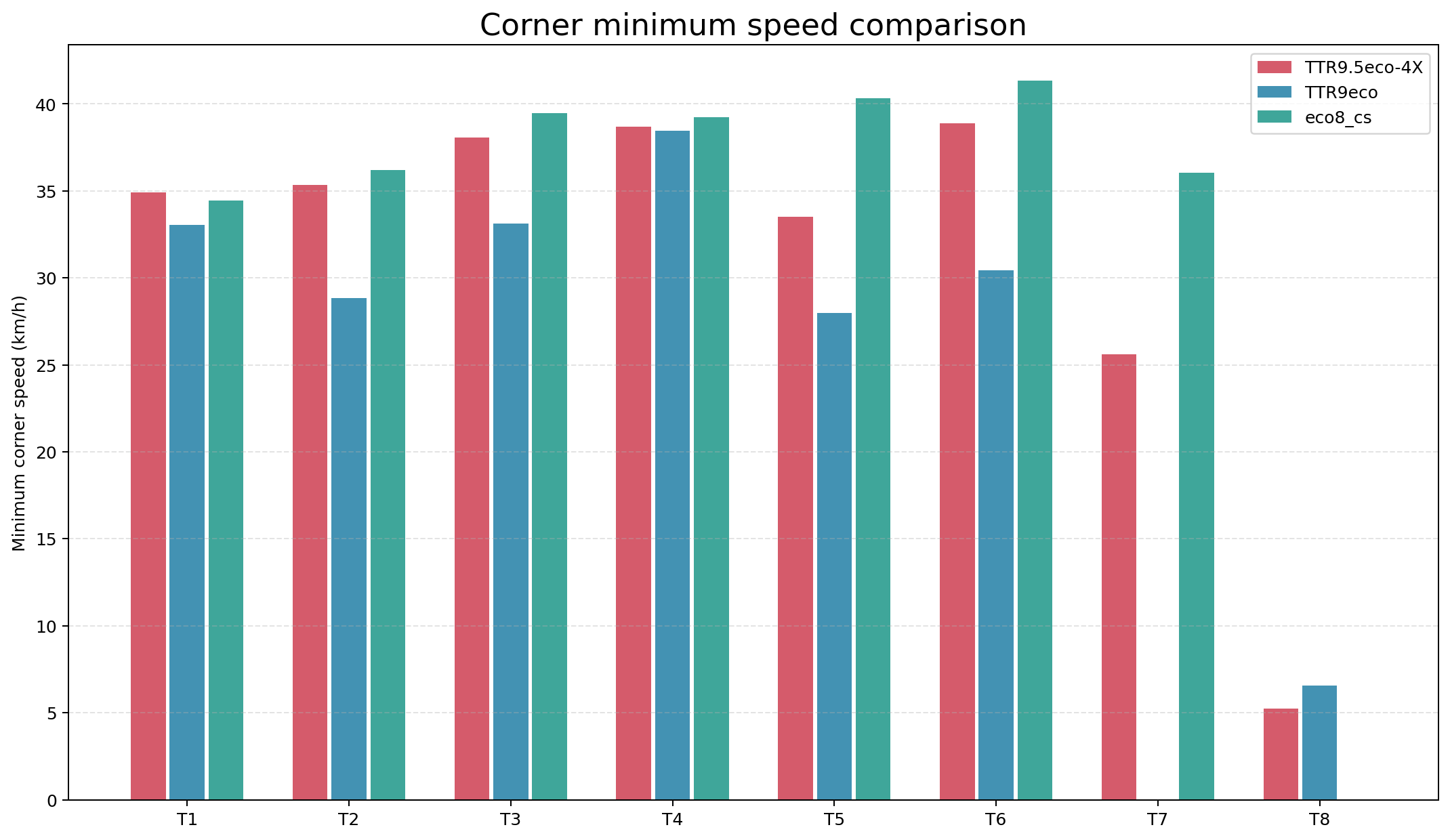
TTR9.5eco-4X 以 34.9 km/h 的最低過彎速度領先,eco8_cs 以 34.4 km/h 緊追在後,兩者差距很小。
- T2:
eco8_cs 以 36.2 km/h 領先,TTR9.5eco-4X 為 35.4 km/h,TTR9eco 明顯偏慢。
- T3:
eco8_cs 以 39.5 km/h 領先,延續中高速彎的較高通過效率。
- T4:
eco8_cs 以 39.3 km/h 小幅領先,TTR9.5eco-4X 38.7 km/h、TTR9eco 38.4 km/h,三者在這個彎位相對接近。
- T5:
eco8_cs 以 40.3 km/h 明顯領先,代表這裡的入彎釋放與出彎提速做得更完整。
- T6:
eco8_cs 以 41.3 km/h 領先,TTR9.5eco-4X 次之,TTR9eco 落差較大。
- T7:
eco8_cs 以 36.1 km/h 領先,TTR9.5eco-4X 掉到 25.6 km/h,顯示這一段對後者影響較大。
T1 重點分析
- T1 是起終點後第一個關鍵制動點,
TTR9.5eco-4X 在這裡保有最高最低過彎速度 36.9 km/h。
eco8_cs:T1 最低過彎速度 36.2 km/h。TTR9.5eco-4X:T1 最低過彎速度 36.9 km/h。TTR9eco:T1 最低過彎速度 28.8 km/h。
Dirty Data 觀察
TTR9.5eco-4X:先移除 0 個移動距離過大的 GPS 跳點;其後另有 18349/30000 個點被判定為賽道外資料,主要發生在進出場、靜止等待或低速偏離參考線區段。TTR9eco:先移除 0 個移動距離過大的 GPS 跳點;其後另有 1461/25069 個點被判定為賽道外資料,主要發生在進出場、靜止等待或低速偏離參考線區段。eco8_cs:先移除 0 個移動距離過大的 GPS 跳點;其後另有 7603/21227 個點被判定為賽道外資料,主要發生在進出場、靜止等待或低速偏離參考線區段。
圖表
overall

TTR8eco_cs
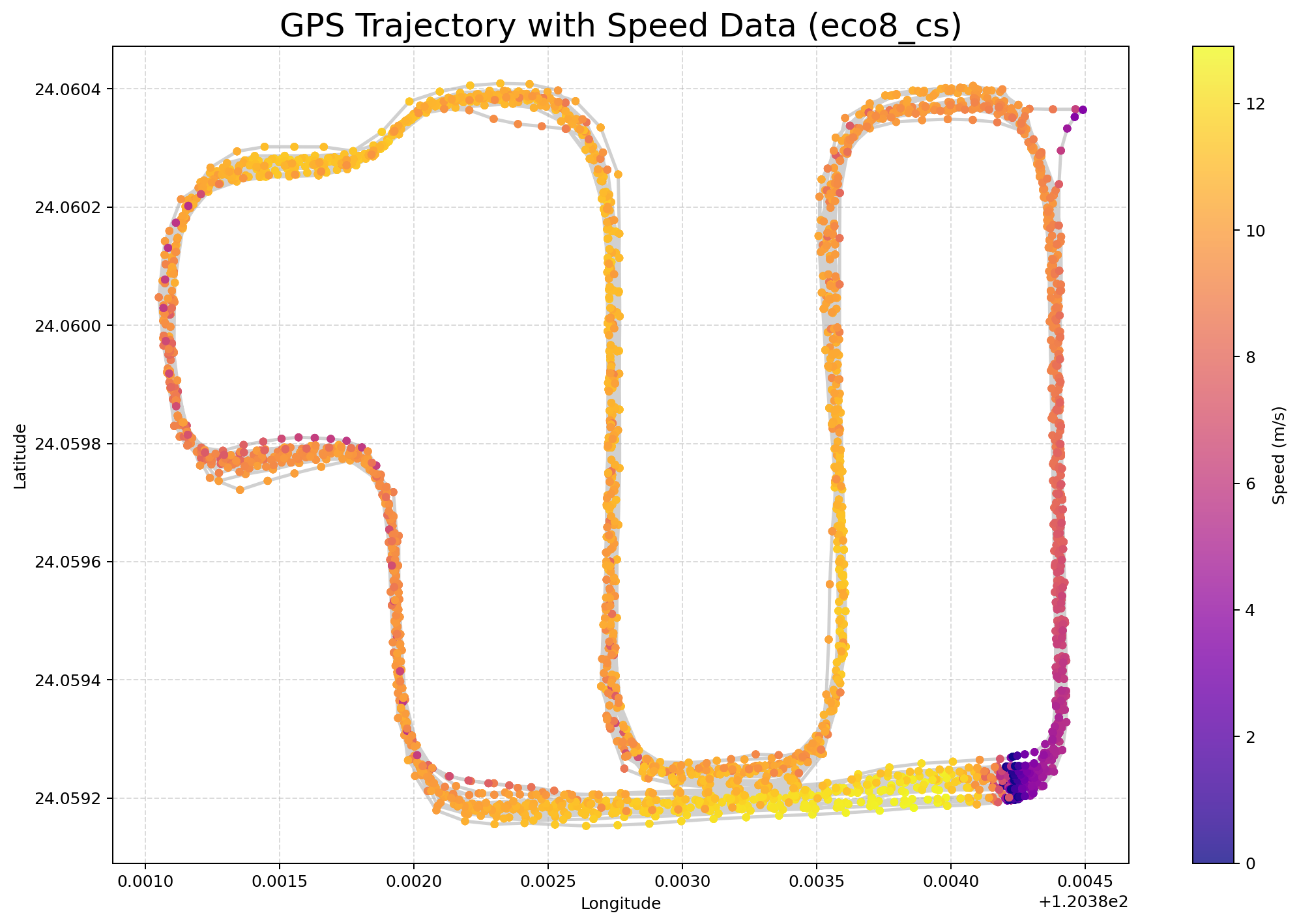
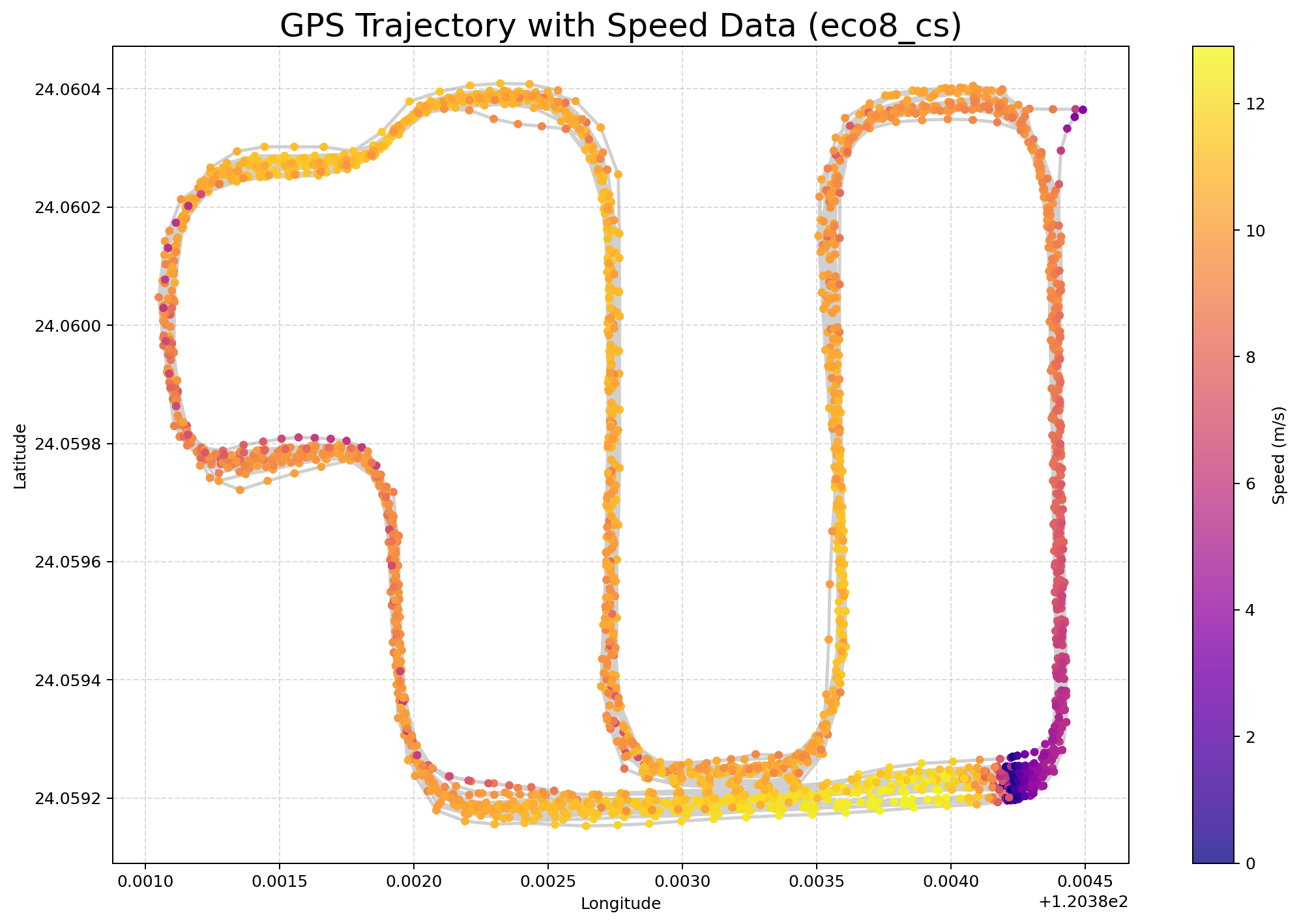
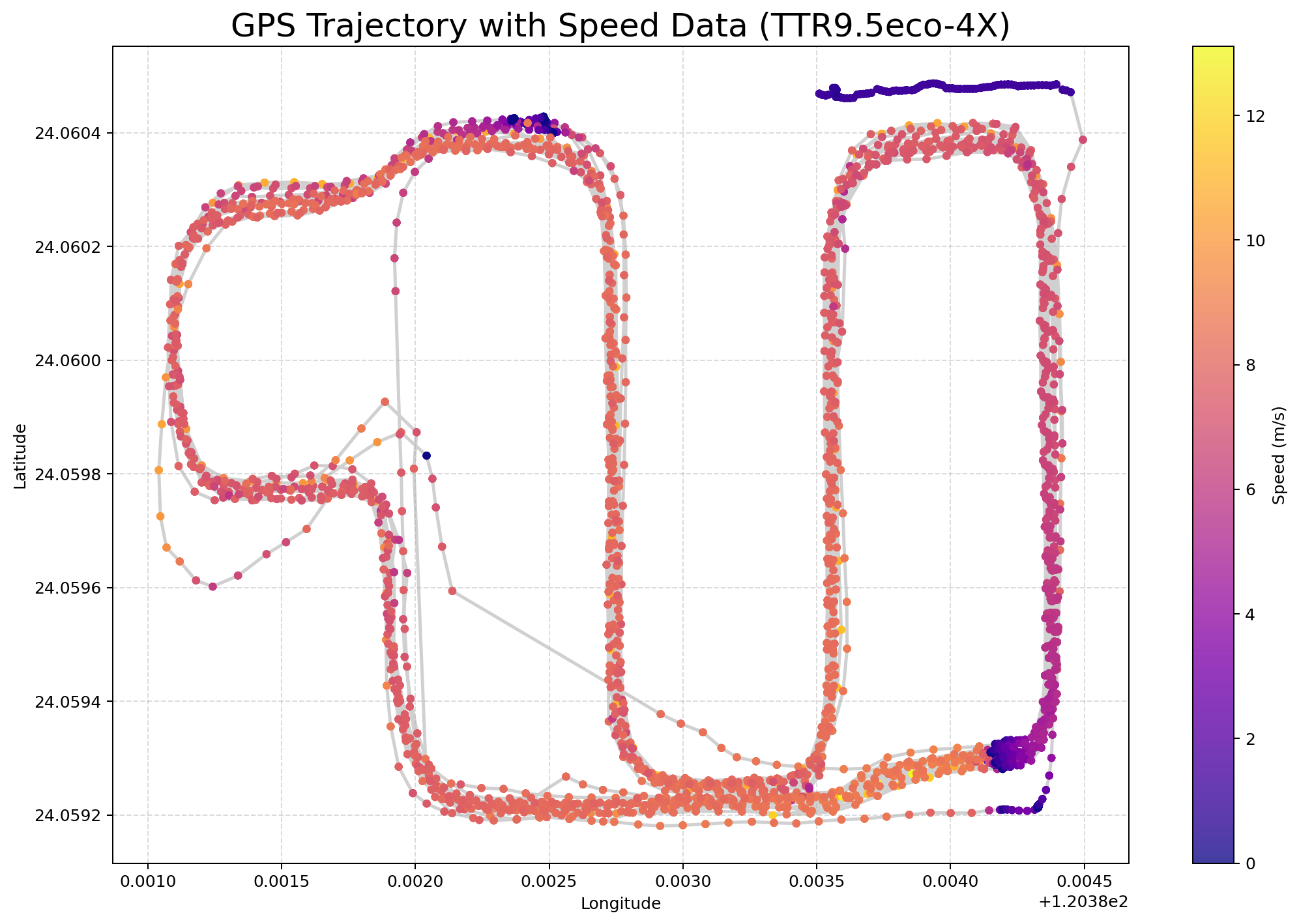
eco8_cs GPS 點位速度圖:灰線是軌跡骨架,彩色點代表每個 GPS 點速度。
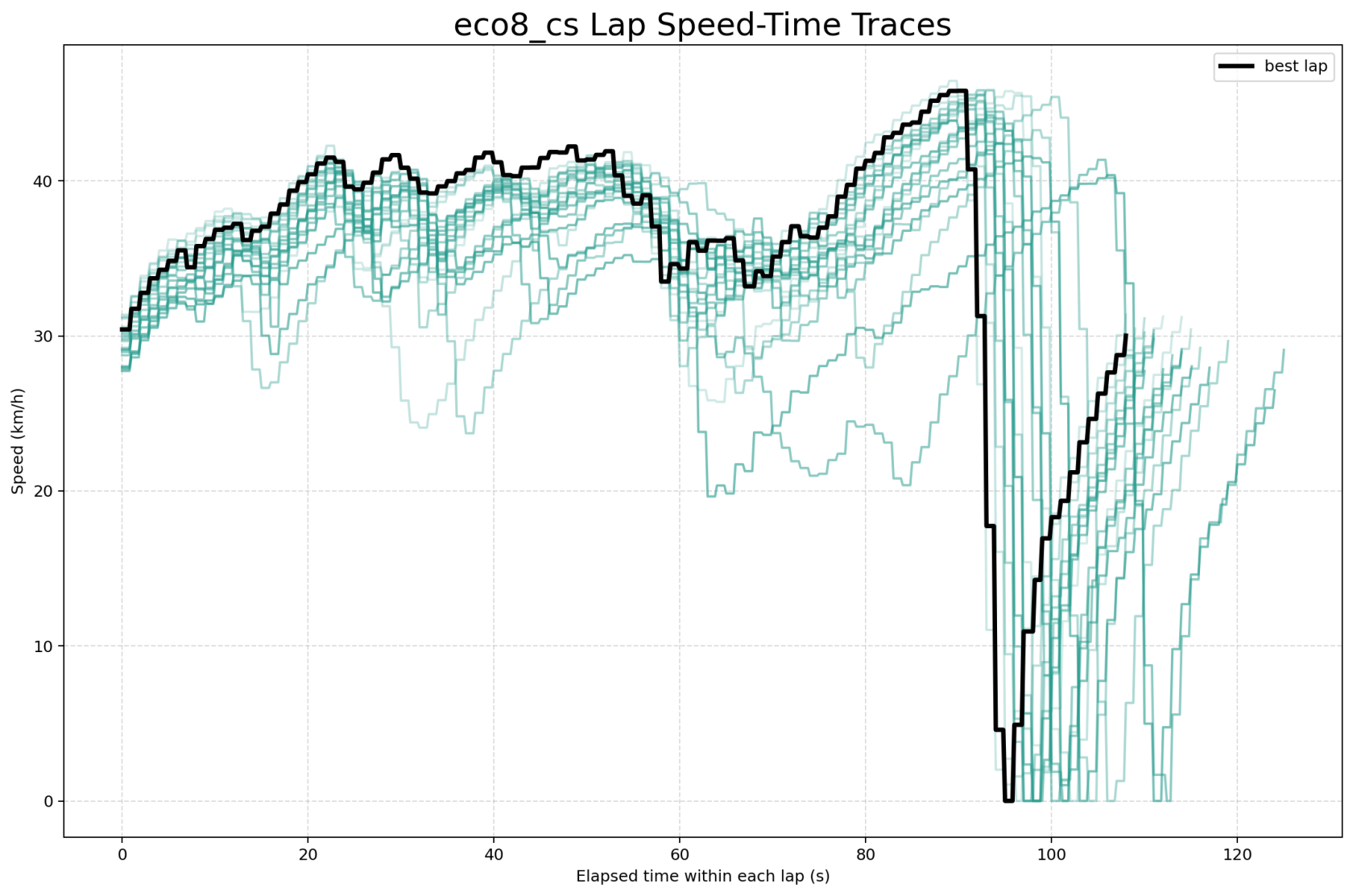
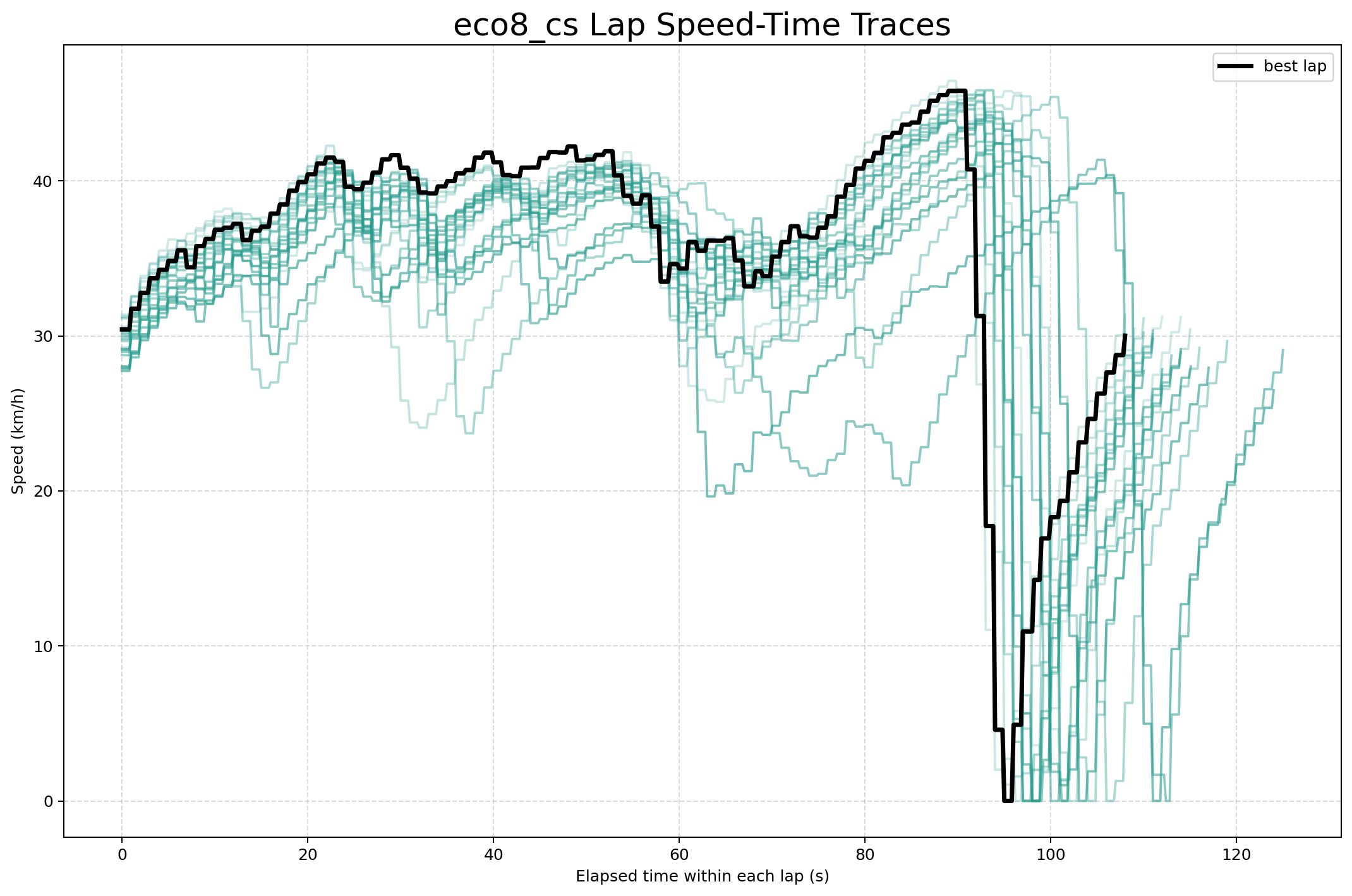
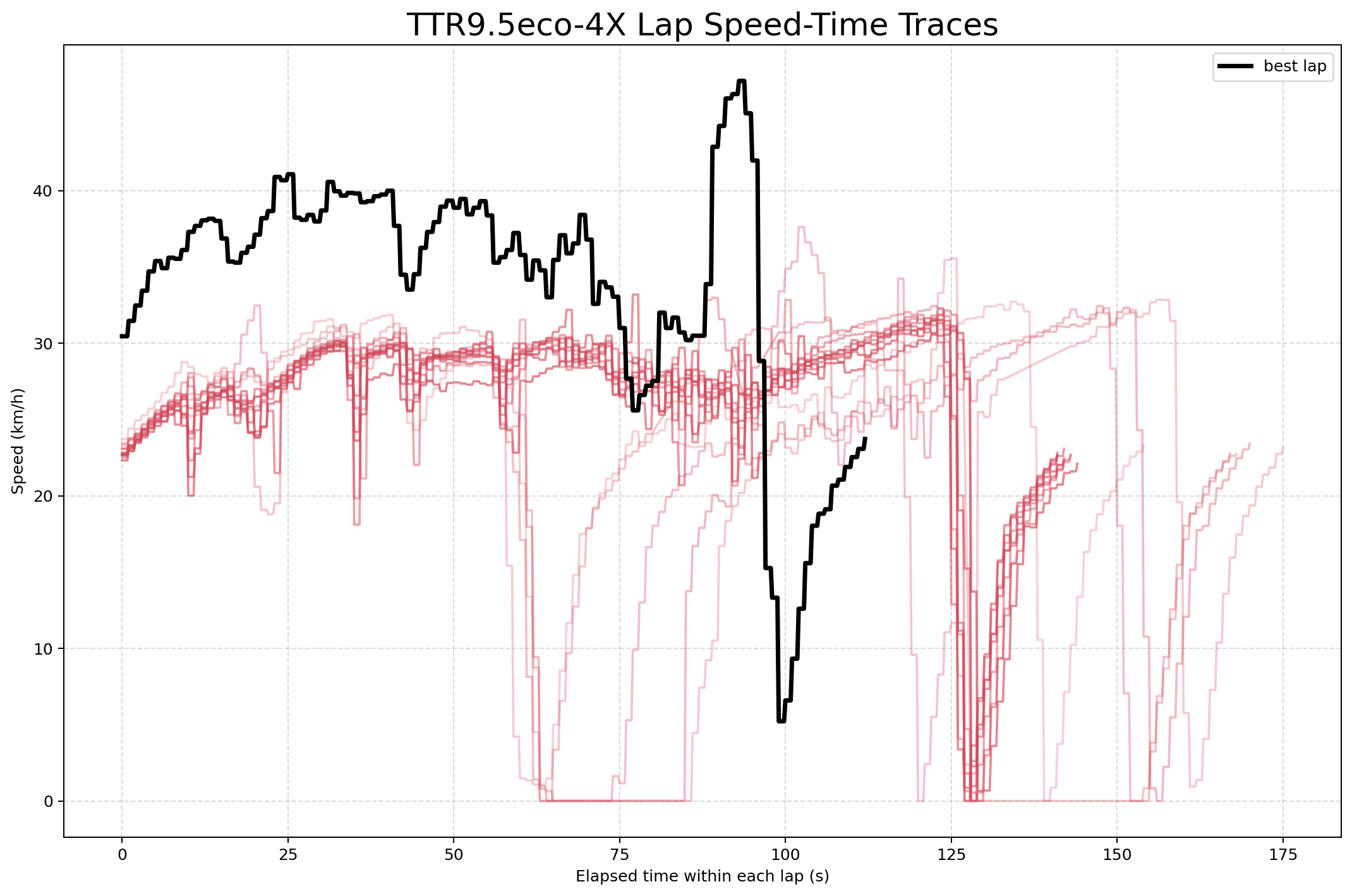
eco8_cs 速度-時間圖:x 軸為每圈內經過時間,通過終點後下一圈重新從 0 秒計算;y 軸為速度。
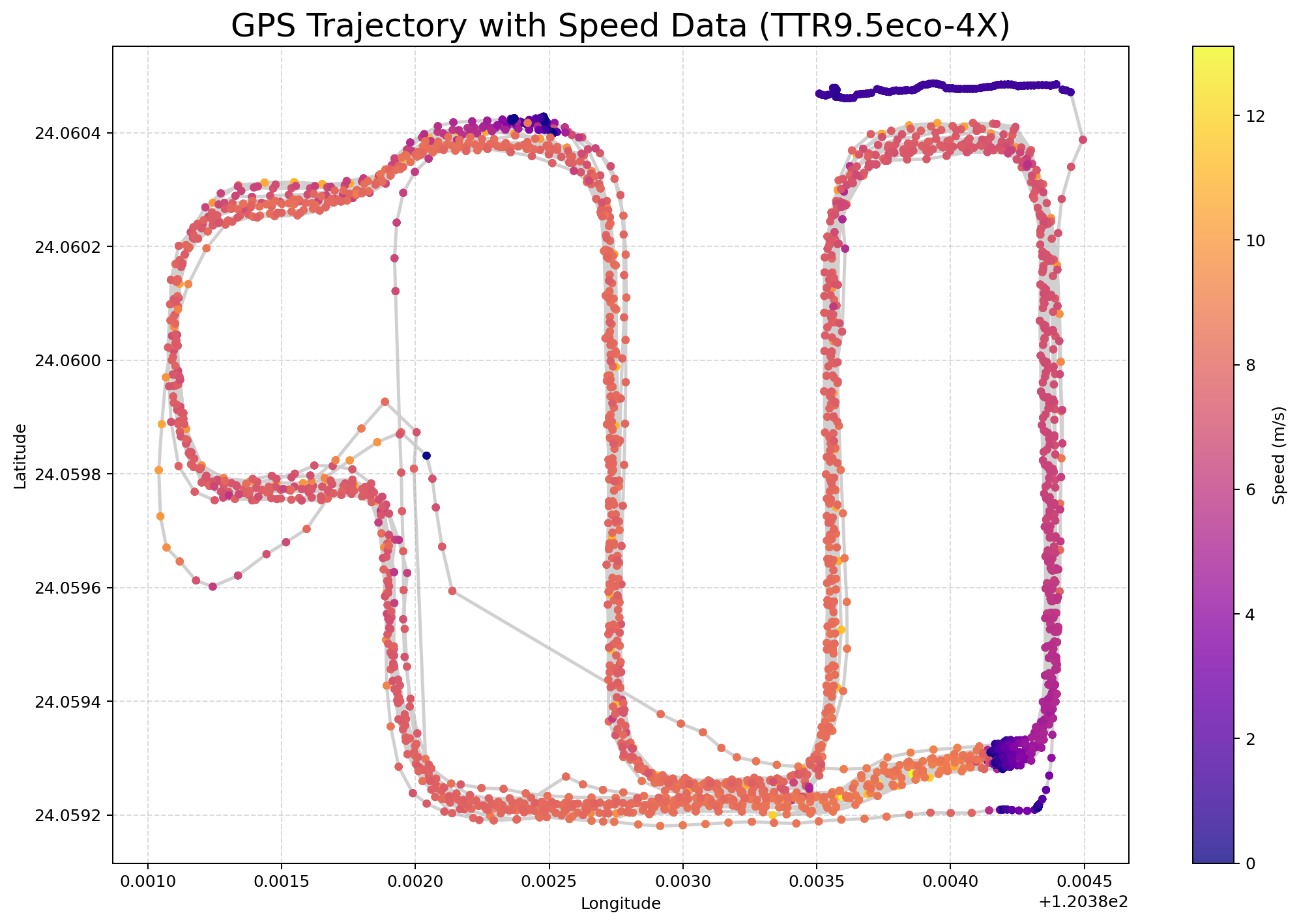
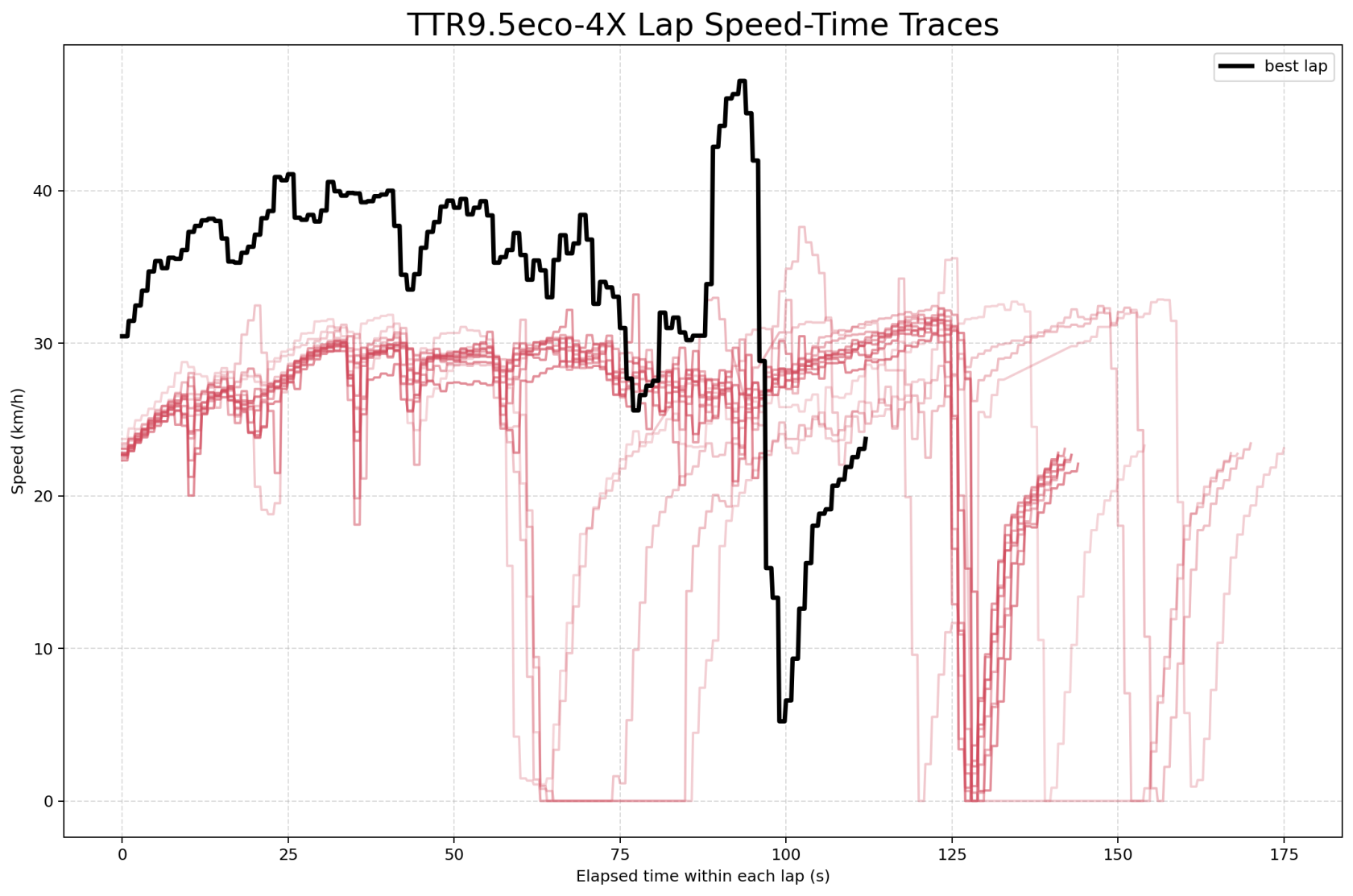
TTR9.5eco-4X
方法補充
- 參考最快圈來自
eco8_cs,偵測圈速 107.999 秒。
- 圈速採用清洗後軌跡與起終點近距離穿越事件重建,與 API 內建圈速可能存在數百毫秒到數秒級差異。
- 本報告強調相對表現比較,因此以同一套清洗與圈速定義套用到三台車。